👋 Bio
I am currently a Research Assistant at Computer Vision and Geometric Learning lab (CVGL)
supervised by Prof. Peidong Liu.
I obtained bachelor degree of Information Engineering from Guangdong University of Technology in 2024.
Previously, I worked as a research intern in CVGL during my senior year, focusing on 3D reconstruction.
In the summer of 2023, I visited the University of Cambridge to study deep learning and computer vision.
Before that, under the supervision of Prof. Wei Meng,
I studied robotics and the application of computer vision in intelligent robots, such as VO/VIO/SLAM.
My research interest lies in 3D vision and Robotics.
I aim to construct a representation of the real world in computers that mirrors human visual perception,
fully utilizing latent information in 2D images such as blur, optical flow, events, or camera poses.
I believe if we can reconstruct 3D/4D scenes in real-time from a video and obatain more information such as mesh, surface normal, texture, material and scene flow,
it will helps robots to think more like humans so that they know how to efficiently interact with the real world.
🌟 News
07/2024
🥳
Paper acceptation:
Our paper BeNeRF is accepted to ECCV 2024! Thanks to all collaborators!
06/2024
🧑🏻🎓 I have graduated with a B.Eng from Guangdong University of Technology and received the Outstanding Graduate Honor!
05/2024
📜 I have finished my bachelor's thesis and received the Outstanding Bachelor Thesis Award!
07/2023
📚 Start my 1-month visiting to study computer vision at Homerton College, University of Cambridge.
📖 Publications
* denotes equal contribution or advising; † denotes corresponding author
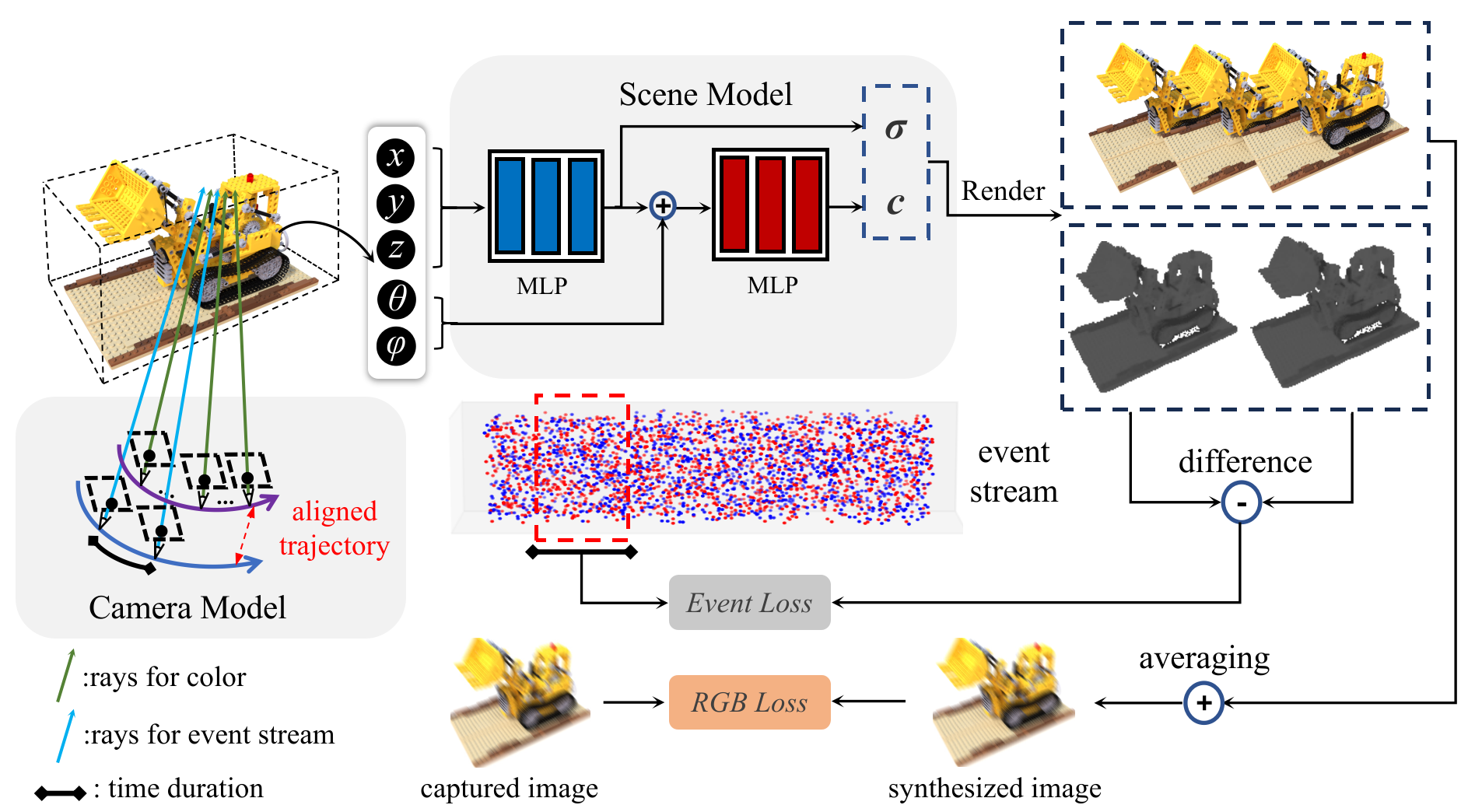
BeNeRF: Neural Radiance Fields from a Single Blurry Image and Event Stream
ECCV 2024
Wenpu Li*, Pian Wan*, Peng Wang*, Jinghang Li, Yi Zhou, Peidong Liu†
TL;DR: We explore the possibility of recovering the neural radiance fields and camera motion trajectory from a single blurry image
🤖 Projects
Wheeled Robot Equipped with a Robotic Arm for Automatic Storage
Automatic Storage/Retrieval System at Robocup China open, 2021
Qingrui Zhu, Wenpu Li, Wenbin Zheng, Yong Zhang, Junyao Li
TL;DR: I developed programs for robot navigation and localization, object recognition, and control algorithms to finish automatic storage task.
Self-Localization UAV Leveraging Visual Odometry
Course Project, 2023
Wenpu Li, Guohua Zhang
TL;DR: Working with GuoHua Zhang on deploying Intel T265 Camera and Visual Odometry for Localization of UAV.
I also used ZED Camera to collect dataset to evaluate the performance of
ORB-SLAM2 and
Stereo-DSO.
🗣️ Language
- Chinese: Native Language
- Japanese: Native Language
- English: Intermediate Level
- Cantonese: Entry Level
🏅 Awards
- National Bronze Medal in Automatic Storage/Retrieval System at Robocup China open, 2021
- National Second Prize in Automatic Storage/Retrieval System at Robocup China open, 2022
- National Second Prize in iCAN Innovation Contest, 2022
- National Third Prize in Blue Bridge Cup, 2022
- First Prize in Contemporary Undergraduate Mathematical Contest in Modeling(Guangdong Division), 2022
- Third Prize in National Undergraduate Electronics Design Contest(Guangdong Division), 2021
- Second Prize in Excellent Student Scholarship, Guangdong University of Technology, 2023
- Third Prize in Fangzhi Scholarship, Guangdong University of Technology, 2021
🎀 Acknowledgement
Thanks to Wenyi Zhang for taking the portrait for my homepage.